
İçindekiler
Arduino İle Servo Motor Konrolü
Merhaba arkadaşlar arduino ile çılgın projelerde olabildiğince hızlı ilerlemeye devam ediyoruz. Bu yazımızın konusu arduino servo motor kontrolü nasıl yapılır nasıl bağlanır onu öğreneceğiz. 🙂 Ama öncelikle servo motorlar hakkında biraz bilgiye sahip olmamız lazım. Servo motorlar, belirli bir konuma dönebilen mükemmel cihazlardır.Genellikle, 180 derece dönebilen bir servo kolu vardır. Arduino’yu kullanarak, bir servoya belirli bir konuma gitmesini söyleyebiliriz ve oraya gidecektir. Bu kadar basit! Servo motorlar ilk önce Uzaktan Kumanda (RC) dünyasında kullanıldı, genellikle RC araçların veya fleplerin bir RC düzleminde yönlendirilmesini kontrol etmek için. Zamanla kullanımlarını robotik, otomasyon ve tabii ki Arduino dünyasında buldular. Eğer sizde heyecanlandıysanız zaman kaybetmeden hemen işe koyulalım 🙂

Malzeme Listesi
1- Herhangi Bir Arduino Modeli
2- Servo Motor
3- Jumper Kablolar
4- Pil Veya Güç Kaynağı
Not: Tüm bu malzemeleri elektronik parça satan yerlerde bulabilirsiniz yada şu ve buadreslerden internet üzerinden güvenle sipariş edebilirsiniz 🙂
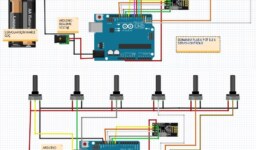
Arduino İle Servo Motor Konrolü Devre Şeması

Önemli Not !!
Bu şemada dikkat edilmesi gereken şey micro servolar için uygun olmasıdır. Eger büyük torklu servolar kullanacaksanız ek güç kaynağı bağlamanız gerekmektedir tıpkı alttaki şemada ki gibi, aksi halde arduinonuz servonun amper’ini karşılayamayacağından arduinonuz yanacaktır !

Arduino’ya servo motor bağlanma adımları şunlardır;
1- Servo motorun üç pimli dişi konnektörü vardır. En koyu veya hatta siyah olan kablo genellikle eksidir.
2- Bunu arduino da GND‘ye bağlayın. kırmızı olan güç kablosunu 5V‘a bağlayın.
3- Servo konektördeki geriye kalan kabloyu arduino’daki dijital bir pine bağlayın.(biz 2. pine bağladık)
Arduino İle Servo Motor Kontrolü Programlama
Devreyi kurduktan sonra alt tarafta yer alan kodları Arduino kartımıza yükleyelim.
| //DONANIM PLUS ELEKTRONİK //TASARIM TOLGA SOYTEPE //İNSTAGRAM Tolgasyp //TWİTTER TSytpp #include<Servo.h> // Servo kütüphanemizi ekledik Servo servom; // bağladığımız servoya bir isim tanımladık void setup() { servom.attach(2); // Servomuzu 2. pine tanımladık}void loop() { servom.write(0); // servoya 0’ıncı dereceye gitmesini söyledik delay(1000); // 1 saniye bekleyip servom.write(45); // 45 derece dönmesini söyledik delay(1000); // 1 saniye bekleyip servom.write(90);// 45 derece daha dönüp 90 dereceye gelmesini söyledik delay(1000); // 1 saniye bekleyip servom.write(180); // 90 derece daha dönüp toplamda 180 dereceye gelmesini söyledik delay(1000);// 1 saniye daha bekleyip tekrar – 180 derece dönüp 0’ıncı dereceye dönmesini söyledik } |
Proje kodlarını buradan indirebilirsiniz 🙂
Minik bir hatırlatma seri iletişimi başlatarak serial monitörden de servonun pozisyonunu izleyebilirsiniz 🙂

Bir yazının daha sonuna geldik umarım faydalı olmuştur anlamadığınız veya kafanıza takılan yerler olursa yorumlardan veya kişisel sosyal medya hesaplarımdan ulaşabilirsiniz. Kolay gelsin 🙂








Leave a comment